jamesp
Cave Dweller 
Member since October 2012
Posts: 36,558
|
Post by jamesp on Aug 10, 2020 5:46:30 GMT -5
Will be interested to see amp draw at no-load, loaded with thin slurry, loaded with thick slurry, loaded with small or larger rocks, etc.
Concerned about heat and continuos duty operation.
May have to incorporate fans on counterweights like stock Lot-O.
Motor could not be better in terms of all other sizes and specs.
At only $14 I ordered two.
|
|
jamesp
Cave Dweller
Member since October 2012
Posts: 36,558
|
Post by jamesp on Aug 10, 2020 6:35:54 GMT -5
Puzzled why dc motor has dropped from no-load .19 dc amps to .10 dc amps as it warms over a 1 hour period. strange
The amps jump back to .19 when shaft is pinched with a couple of pounds of force.
|
|
|
|
Post by knave on Aug 10, 2020 7:06:36 GMT -5
Bearing oil viscosity?
|
|
EricD
Cave Dweller
High in the Mountains
Member since November 2019
Posts: 1,142
|
Post by EricD on Aug 10, 2020 7:20:21 GMT -5
Will be interested to see amp draw at no-load, loaded with thin slurry, loaded with thick slurry, loaded with small or larger rocks, etc. Concerned about heat and continuos duty operation. May have to incorporate fans on counterweights like stock Lot-O. Motor could not be better in terms of all other sizes and specs. At only $14 I ordered two. Your load should be determined by motor speed and the offset/weight of your counterweights only. Since that is the only thing the motor is moving. Might be easiest to just have a fan blowing on it until you get satisfactory results from it.
|
|
jamesp
Cave Dweller
Member since October 2012
Posts: 36,558
|
Post by jamesp on Aug 10, 2020 19:10:04 GMT -5
That seems to be the only possible variable Evan. I would think that the draw would increase as it heats up. Maybe the permanent magnets have a reaction to heat ? What motor temp can you touch for 30 seconds before it gets unbearable ? That is my situation with this motor. One thing for sure the power supply gives dead accurate amp draw readings. Interesting to measure amp/power draw for different tumbling situations. This $60 power supply should drive a 1-2 amp 18 vdc motor and should be enough for a 10 pound rotary. Small military surplus DC motors costing the military well over $500-1000 can be picked up for song. |
|
|
|
Post by knave on Aug 10, 2020 19:19:01 GMT -5
Somewhere around 115 - 120°F which “may” be normal for a DC motor. I don’t see much DC motors.
On a brand new motor that isn’t broken in, the grease or bearing drag is more when it is cold. Kinda like a starched pair of pants. After you run for a mile, the bearings are free, and the pants are nice and soft. Lol.
|
|
jamesp
Cave Dweller
Member since October 2012
Posts: 36,558
|
Post by jamesp on Aug 10, 2020 19:21:29 GMT -5
Will be interested to see amp draw at no-load, loaded with thin slurry, loaded with thick slurry, loaded with small or larger rocks, etc. Concerned about heat and continuos duty operation. May have to incorporate fans on counterweights like stock Lot-O. Motor could not be better in terms of all other sizes and specs. At only $14 I ordered two. Your load should be determined by motor speed and the offset/weight of your counterweights only. Since that is the only thing the motor is moving. Might be easiest to just have a fan blowing on it until you get satisfactory results from it.
I agree Eric. Maybe I can find a point source blower around here. Anxious to connect this on up and get some runs out of it and see behavior. Surprised to find a motor that fits so many variables. Must baby it. Suspicious it is an intermittent motor used in RC toys but it does have nice large ball bearings. The tiny DC motors used in small drones blow my mind in being so small and controllable. Wish I could measure temp. |
|
jamesp
Cave Dweller
Member since October 2012
Posts: 36,558
|
Post by jamesp on Aug 10, 2020 19:25:50 GMT -5
Somewhere around 115 - 120°F which “may” be normal for a DC motor. I don’t see much DC motors. On a brand new motor that isn’t broken in, the grease or bearing drag is more when it is cold. Kinda like a starched pair of pants. After you run for a mile, the bearings are free, and the pants are nice and soft. Lol. I get the hot verses cold lubricant. Funny analogy. Well, 120F is reassuring. So 140F is really uncomfortable ? |
|
|
|
Post by knave on Aug 10, 2020 19:54:49 GMT -5
Somewhere around 115 - 120°F which “may” be normal for a DC motor. I don’t see much DC motors. On a brand new motor that isn’t broken in, the grease or bearing drag is more when it is cold. Kinda like a starched pair of pants. After you run for a mile, the bearings are free, and the pants are nice and soft. Lol. I get the hot verses cold lubricant. Funny analogy. Well, 120F is reassuring. So 140F is really uncomfortable ? A 140° compressor discharge is good for 1 second |
|
EricD
Cave Dweller
High in the Mountains
Member since November 2019
Posts: 1,142
|
Post by EricD on Aug 10, 2020 20:02:56 GMT -5
I'm good with 140 on my hand for a good 30 seconds. That's what my lot-o runs at. Then again I do change oil on motors running in excess of 220 and have to touch that for at least that time.
|
|
|
|
Post by knave on Aug 10, 2020 20:27:10 GMT -5
So 140F is really uncomfortable ? The code for a hand sink is 120°F or less at the faucet to prevent scalding. In a facility with children or disabled this is enforced by inspectors. Tangent: (120°F is prime for legionella bacteria, so most facilities store it >140°F and mix it cooler close to point-of-use) A real man like Eric can probably shower in 120° without breaking a sweat. That said, I need to amend my previous statement to; A calloused hand could probably withstand 130° for about 10 - 30 seconds. |
|
EricD
Cave Dweller
High in the Mountains
Member since November 2019
Posts: 1,142
|
Post by EricD on Aug 10, 2020 21:25:53 GMT -5
Surface contact can be a bit different than immersion. Yes I can shower in 120 degree water no problem, but ambient would have to be at least <20
My dad stuck his hand in >1400 coal briquettes for a good 10 seconds and didn't have much trouble besides healing up for a few weeks. He said he had no pain but retained all feeling.
|
|
jamesp
Cave Dweller
Member since October 2012
Posts: 36,558
|
Post by jamesp on Aug 11, 2020 4:02:22 GMT -5
Slow this one down for a rotary
|
|
jamesp
Cave Dweller
Member since October 2012
Posts: 36,558
|
Post by jamesp on Aug 11, 2020 4:30:38 GMT -5
Guaranteed to damage tumbles because of large amplitude.
Looks like about 2 inches amplitude, about 1000 vibes per minute, vibrating mass ~10-20 pounds.
Amplitude increases as distance from center shaker shaft increases.
Direct drive and very basic vibrating system.
No spring to effect vibrating system.
No damping to effect vibrating system(vibratory rock tumblers have little to no damping also, slurry to a small degree)
Would be 2 dimensional vibration but shaker shaft moves axially too so this is true 3 dimensional vibration.
|
|
jamesp
Cave Dweller
Member since October 2012
Posts: 36,558
|
Post by jamesp on Aug 11, 2020 4:54:58 GMT -5
Some design criteria for vibe
Relative motion between rocks in a vibe is where the abrading action occurs.
Maintaining contact is important, rocks bouncing against each other makes for both poor abrasion efficiency and potential surface damage.
All rocks should make a full travel path from bottom of hopper to top of hopper even if it takes 10 minutes(very slow 'action') or even longer. Fast action can invite or suggest bouncing.
The bottom of the hopper has the highest grinding forces due to the weight of the other rocks above.
The top has the lowest grinding forces and is also where bruises often occur due to higher likelihood of rocks bouncing.
|
|
jamesp
Cave Dweller
Member since October 2012
Posts: 36,558
|
Post by jamesp on Aug 11, 2020 5:01:49 GMT -5
Goal for this Lot-O mod is to decrease T and decrease A using a faster motor and smaller counterweighting. No other mods. T is the time period for one full vibration. Shorten period. Or increase vibrations per minute. A is the distance travelled per half a vibration. Or decrease vibration travel distance. Again there is little to no damping or shock absorber installed on a rock vibe. An added thick slurry does dampen the system though. y(t) is the force to create the vibration. For the Lot-O this force is generated by the motor spinning counterweights. Changing the rpm of the motor and the counterweights is the same as changing two very different variables effecting y(t). 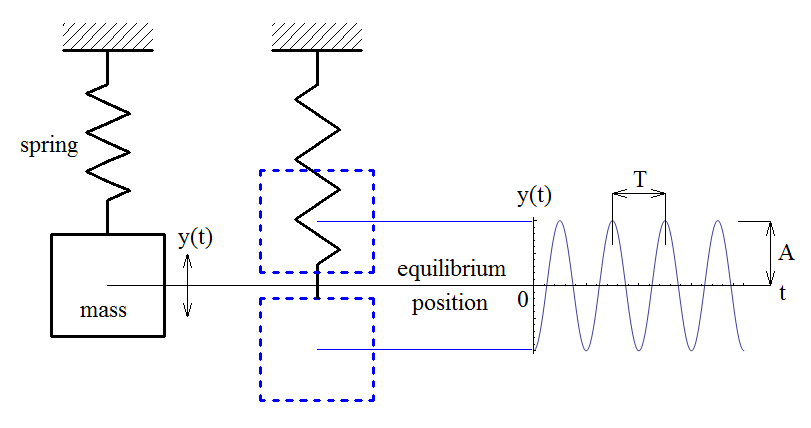 So basically this is a forced vibration system without damping until slurry is thickened or perhaps running different rocks like pea gravel verses 1 inch rocks. Spring/mass/vibration force system is simpler than spring/mass/damper/vibration force system. Above model is not representative of Lot-O geometry as it is one dimensional. No matter, the Lot-O is basically 2 dimensional. End result is same whether vibrating in one dimension or two dimensions. Both x direction and y direction of travel will be shortened and rate of vibration increased. |
|
jamesp
Cave Dweller
Member since October 2012
Posts: 36,558
|
Post by jamesp on Aug 11, 2020 5:48:04 GMT -5
The Vibrasonic offers adjustment by increasing the amount of counterweight only. Motor speed is fixed. The Vibrasonic counterweights are also adjusted for different sized hoppers(mass). The adjustable counterweights were probably incorporated for the use of different sized hoppers and not so much to tune for one size of hopper. The Gy-Roc vibe may have multiple pulley sizes for speed adjustments. See sheaves on motor:  Mini Sonic has frequency speed control. Probably 0-3600/minute.  |
|
pizzano
Cave Dweller
Member since February 2018
Posts: 1,390
|
Post by pizzano on Aug 11, 2020 8:54:50 GMT -5
" Suspicious it is an intermittent motor used in RC toys but it does have nice large ball bearings.
The tiny DC motors used in small drones blow my mind in being so small and controllable."
One of the things the "drone" motor lacks is torque............they are not so much voltage regulated as they are watt/amp sensitive. Every aspect of the rpm value is controlled/monitored by an ESC which each motor is assigned through a series of complex monitors which continuously measure heat, dynamic resistance, speed (rpm), power consumption and rotation displacement. What provides the actual torque related to the motors ability to power (lift ,rotate/turn) the craft are the rotor blades (props). Every (quality) motor is performance tested (factory) under the most extreme conditions, and each is rated for certain variables of "not to exceed"........meaning rotor type, amperage/wattage and voltage guidelines. The type of ESC required is also regulated to motor performance as well.
Most "drone" motor failures are due to users "stretching" those limits buy trying to achieve the most torque with the least amount of power consumption and craft weight distribution (over propping, higher amp discharge rates and number of battery cell volumes).......trying to get the most out of the least.........weight being the critical aspect. It's no different with RC land craft either. Gear ratios, wheel/hub displacement, drive shaft, axle(cv) distribution ratios all play the same role in DC motor performance as it relates to available torque. Once again, regulated by the individual Electronic Speed Controllers........heat again being the culprit as with any electrical component.
|
|
jamesp
Cave Dweller
Member since October 2012
Posts: 36,558
|
Post by jamesp on Aug 11, 2020 12:37:11 GMT -5
I have been practicing with a Walmart drone. Got a Mavic Mini unopened in box. Can't wait to graduate to flying it. Stunned at the control systems incorporated for controlling the motors on these things. Miracles of engineering. Taking dc motor controls to new levels for sure. DC motors are pretty amazing from the controllability stand point pizzano. This motor is not a over-the-top expensive motor like the military or industrial applications call for but it has gobs of torque and is smooth as silk. For tumblers there are plenty of fractional HP surplus motors the military paid $1000's of dollars to have made for under $20 surplus. And adjustable surplus power supplies with serious control features can be had for cheap. It is hard to stop this motor by squeezing with fingers at only 10 volts and many times more torque at 20 volts. It draws 1 amp when pinched as hard as I can physically squeeze. Normally enough to run a 12 pound rotary at 40 rpm. The Lot-O should draw way less. I was shocked to find one to fit the Lot-O with the needed dual output shafts. If the heat you mention is a problem it will be upsetting. Actually am very pumped to take a Lot-O into higher vibration rates. Or any vibe for that matter but the Lot-O is about a cool a vibe as there is. |
|
Wooferhound
Cave Dweller
Lortone QT66 and 3A
Member since December 2016
Posts: 1,432 
|
Post by Wooferhound on Aug 11, 2020 13:07:33 GMT -5
Just use a 24vdc power supply and a DC motor speed control.
|
|














